UMX Robotics
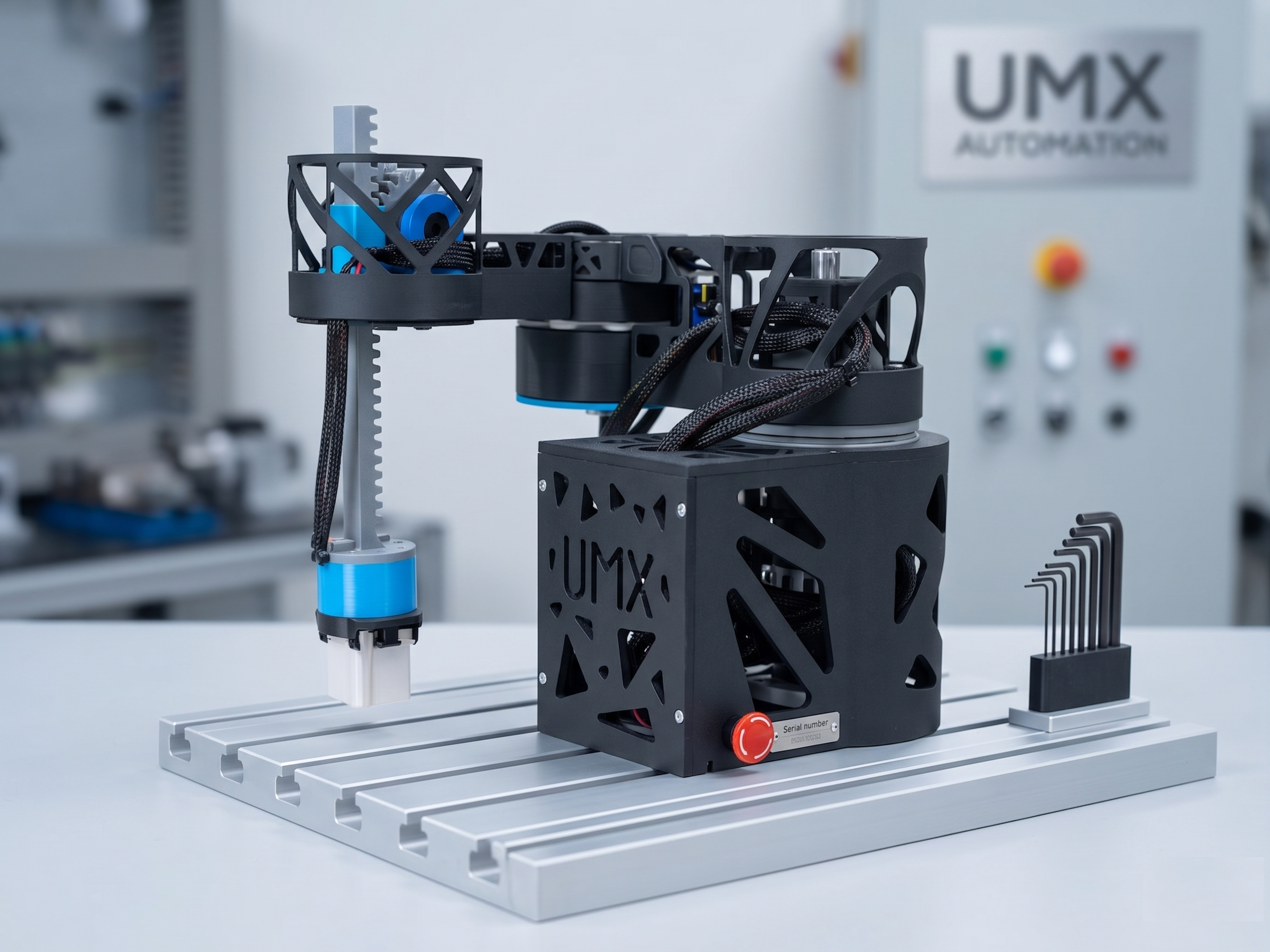
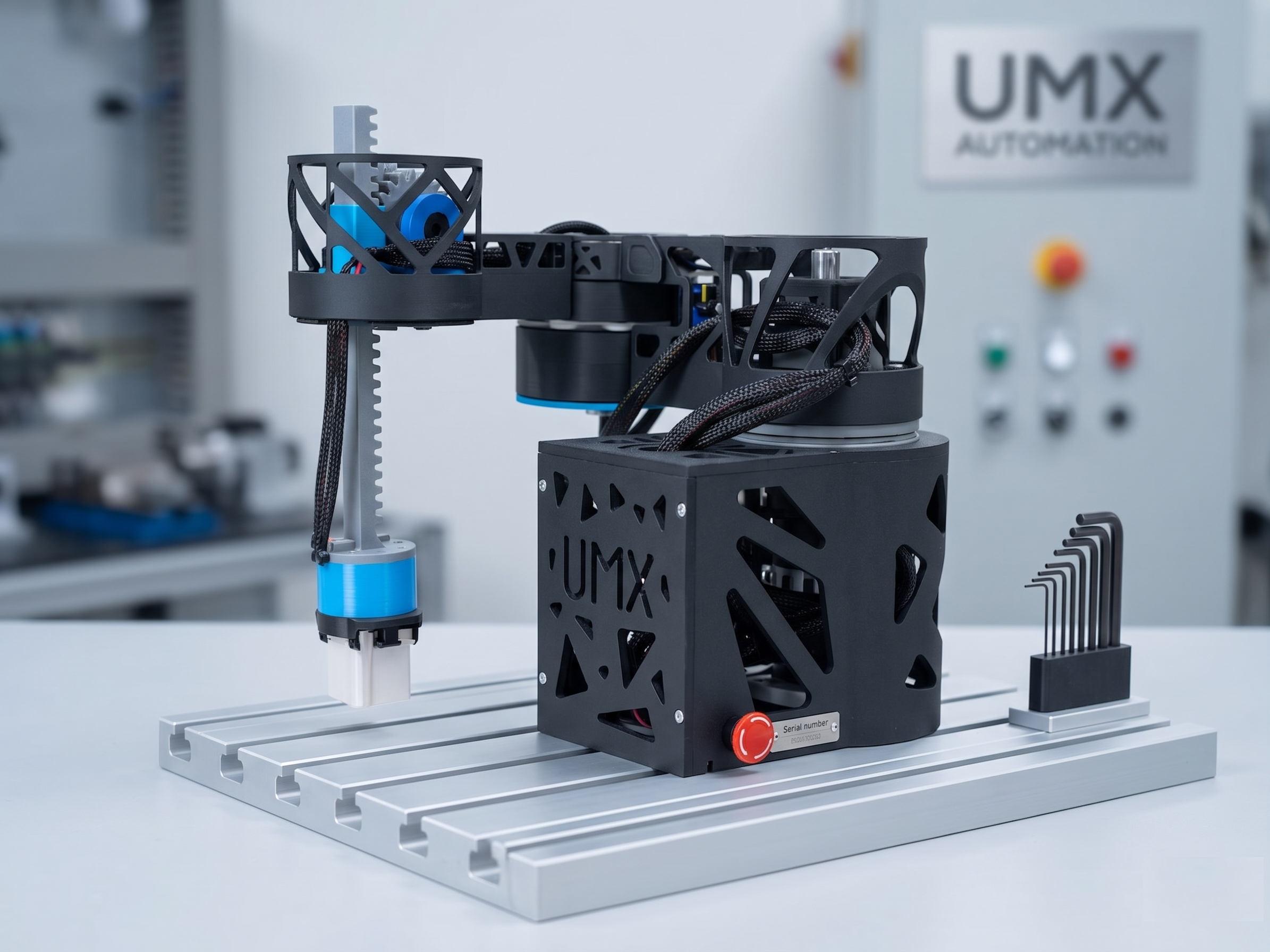
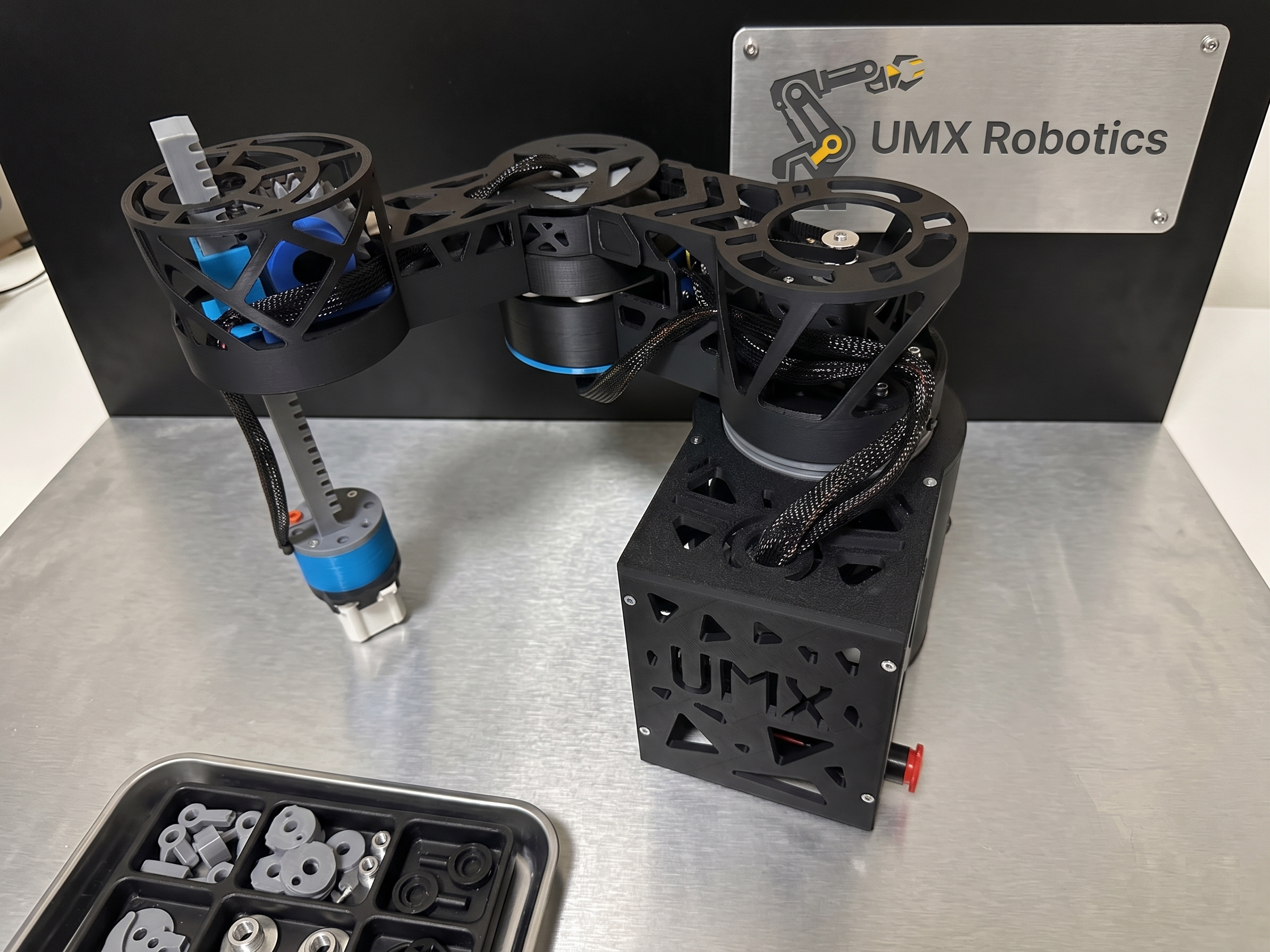
Affordable, 3D-printed robotic arm with ESP32 control and PLC integration over Modbus. NEMA17 steppers, custom PCB, inverse kinematics. Still early-stage.
Industrial AutomationESP32ModbusPCB3D Printing
Visit site →
01 · Notebook
Mladen Uzunov. DevOps engineer with six years in the rack and a growing obsession with the factory floor. This is the lab notebook — what I'm building, learning, and shipping.
02 — Now
Full-time on the SCARA build this quarter.
Diploma 2026 — building now
A 3-axis SCARA arm driven by an ESP32 and orchestrated by a Mitsubishi PLC over Modbus RTU. The point: prove that hobby-grade firmware and industrial control can share the same factory floor — without one pretending to be the other. Programmed in Structured Text on the PLC side, C++ on the firmware side. Built in public as my Mechatronics diploma project.
03 — The Stack
I've always loved Swiss knives — one tool, many blades, all useful. That's the kind of engineer I decided to become. The same person managing CI/CD pipelines for hundreds of VMs is the one designing the PCB and writing the firmware. Not because the tools overlap, but because the thinking does.

Certified
LPIC-1 · Linux Professional Institute
04 — Work
Three tiers: early-stage prototypes I'm turning into products, the open-source tools I maintain, and the quick builds that live somewhere between a curiosity and a proof.
Early-stage
Affordable, 3D-printed robotic arm with ESP32 control and PLC integration over Modbus. NEMA17 steppers, custom PCB, inverse kinematics. Still early-stage.
Open-source, 3D-printed educational robotic arm powered by ESP32. Designed for classrooms, universities, and maker spaces. Maker, Full and Digital kit tiers.
Open source
Secure MCP server for controlled command-line operations. Whitelisting, path-traversal prevention, async timeouts, graceful failure. Published to PyPI.

CLI companion for chatting with AI models. Supports OpenAI, Anthropic, MistralAI, Google AI, Ollama and the MCP protocol. Streaming, ETL of model outputs, multi-provider routing.
Prototypes & experiments
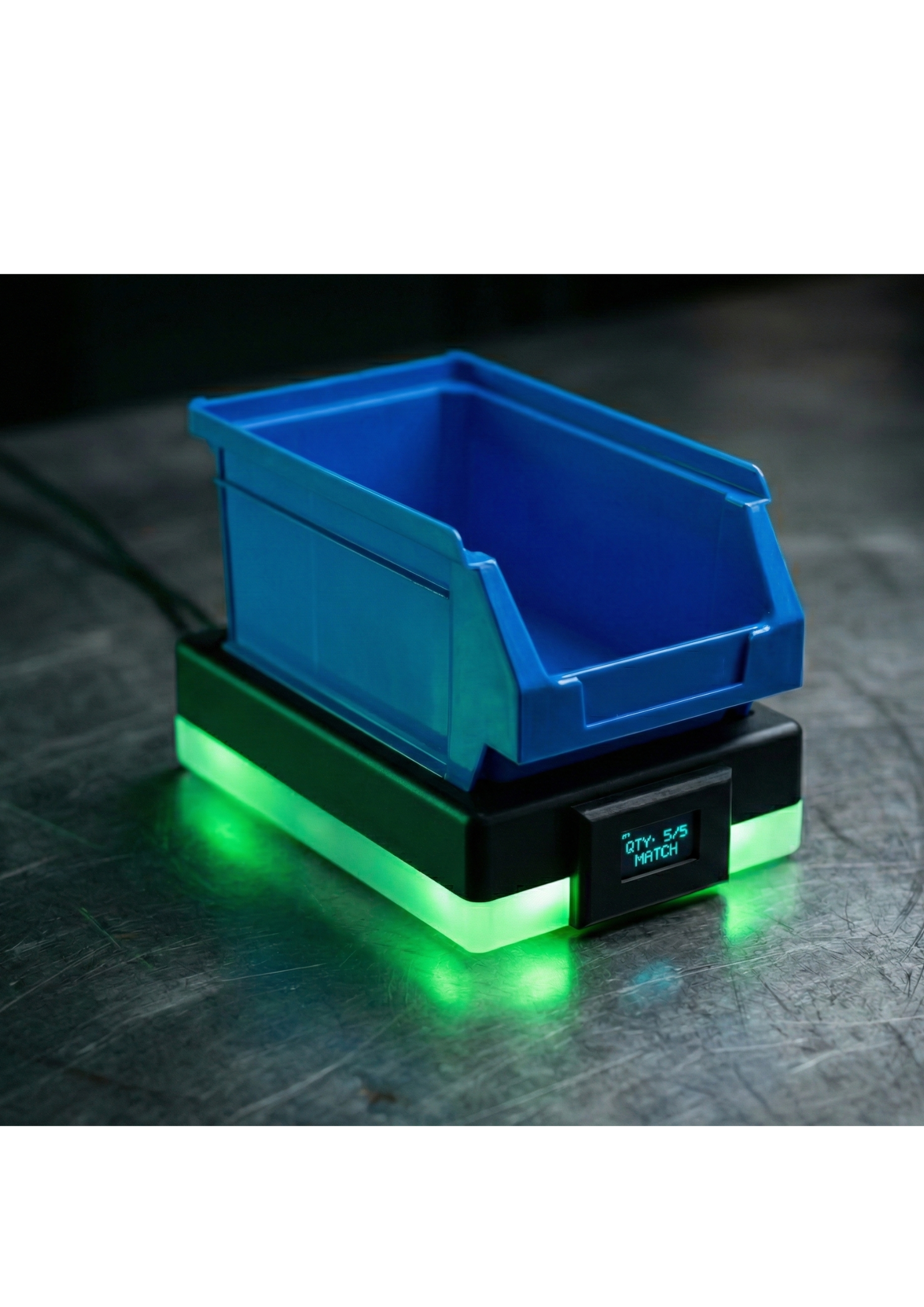
Industrial IoT device for assembly verification with real-time weight sensing, cloud connectivity, storage monitoring and theft detection.
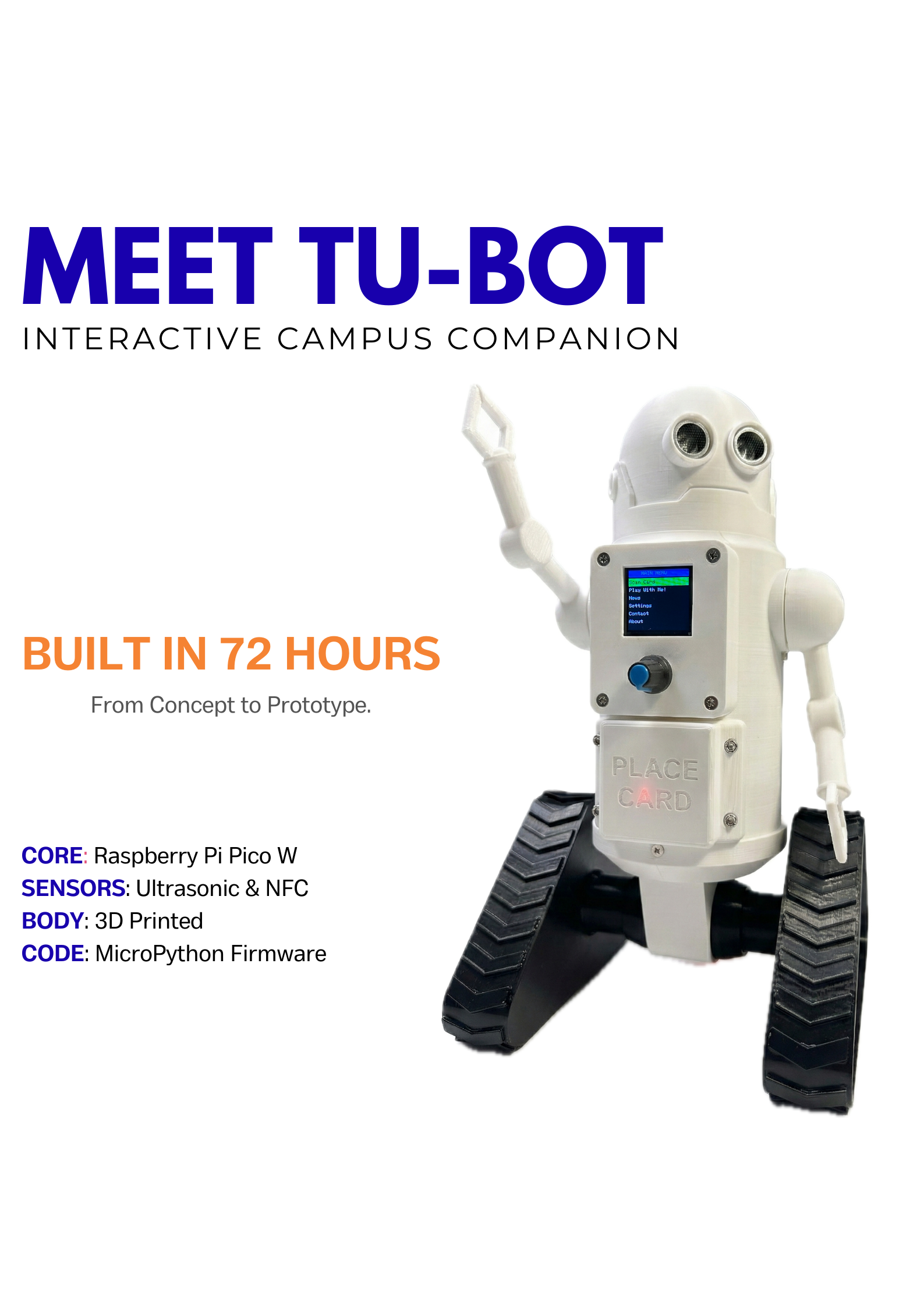
Interactive campus robot prototype built in 72 hours. Object detection, custom emote engine, NFC integration, data collection.

4 Degrees of Freedom robotic arm with gripper. Precise servo control for pick-and-place and automated assembly tasks.
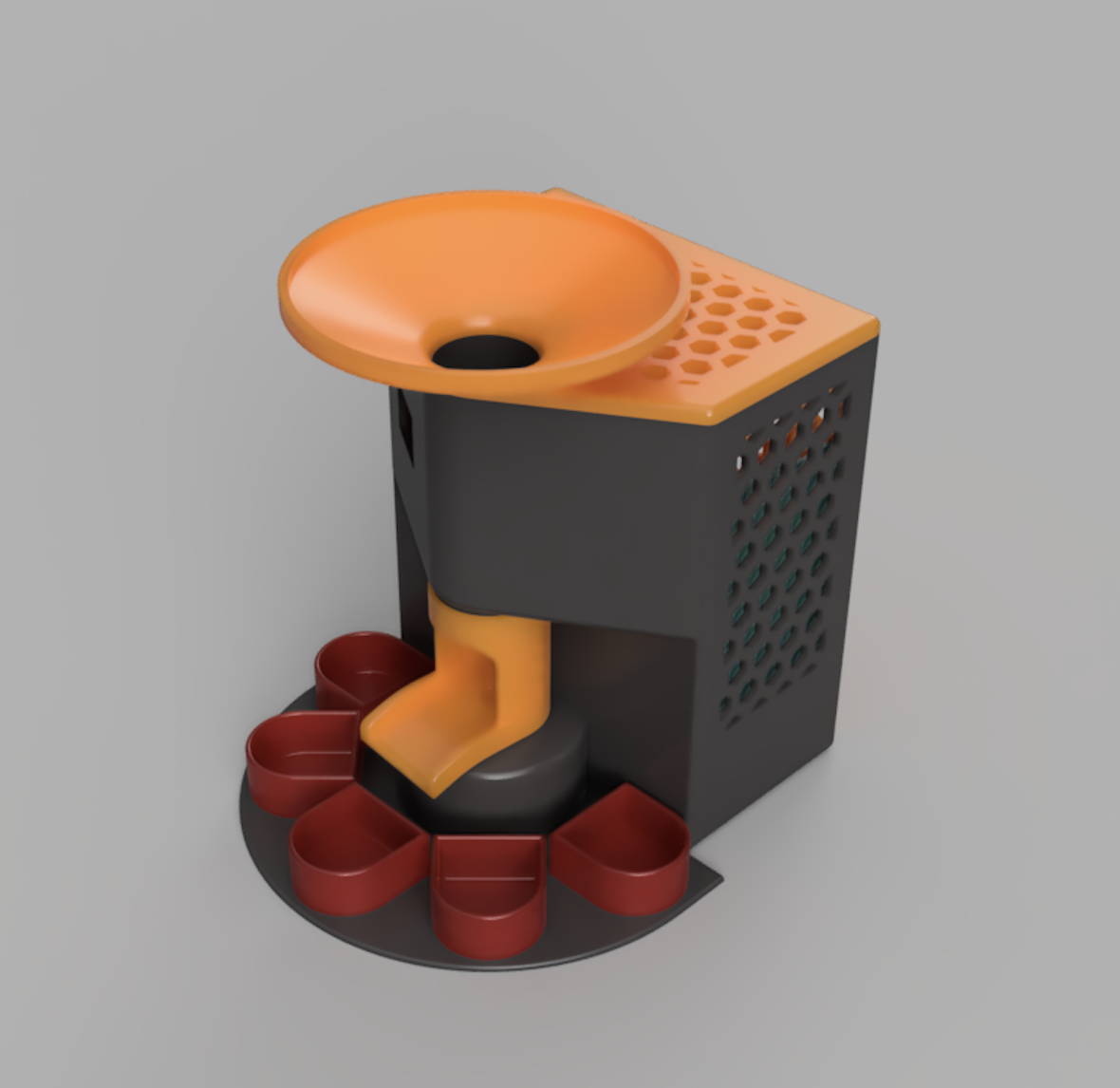
Automated ball sorting system using color sensor detection and state-machine logic. PLC-style sequential control on embedded hardware.
05 — Notes
A small archive of essays and build logs is on its way — starting with the SCARA × PLC project. Why an ESP32 next to a PLC. What Modbus taught me about contracts between systems. How industrial logic and hobby firmware can share the same floor.
Coming soon
First post: Why I'm putting an ESP32 next to a PLC.
06 — Changelog
The same engineer, evolving through a few major releases — each one widening the stack a little further down (or up, depending on who you ask).
v4.0
2026
SCARA × PLC diploma project kicks off — bridging ESP32 firmware with a Mitsubishi PLC over Modbus RTU. Co-founded the TU Robotics Club and won its first competition for an innovative project. Open-source contributions to the MCP ecosystem continue.
v3.0
2024 – 2026
Moved into networking at Digitas — FortiNet, Arista, Brocade, A10 load balancing, custom WAF/IPS, VLAN architecture, cert management with Myra. Migrated the edge from Juniper to FortiNet. In parallel: rebuilt Netflow, Netbox and LibreNMS from scratch with CI/CD-driven package builds scanned through Artifactory Xray. Automated Netbox as the source of truth for FortiNet interfaces, PowerDNS and VLAN records. Led the CentOS → RHEL 9 migration. Helped evaluate replacing AWX with Semaphore. On the hardware side: started prototyping UMX Robotics — custom PCBs, ESP32-driven motion control, 3D-printed arms — still early-stage.
v2.0
2022 – 2024
Joined Digitas. Built end-to-end Ansible AWX patching for hundreds of VMs, CI/CD deployment pipelines with Artifactory builds and Xray scanning, Puppet + Hiera for config management, Bolt for ad-hoc orchestration. Wrote a custom openfortivpn wrapper (split-tunnel, internal-only routing) adopted company-wide. Built Python automation for multiple departments — Jira tooling, Grafana dashboards, load testing with JMeter. Migrated and stood up new projects across the platform. Started studying Mechatronics at TU Sofia – Plovdiv.
v1.0
2019 – 2022
Linux engineering at SiteGround. Executed infrastructure migrations supporting 100,000+ customers and 300,000+ websites. Expert-level troubleshooting for WordPress, Joomla, and Drupal at scale. Bash automation for repetitive admin tasks and diagnostic workflows.
07 — About
Bulgaria-based DevOps and network engineer with six years operating production Linux infrastructure and enterprise networks. Currently at Digitas, splitting time between networking (FortiNet, Arista, A10) and DevOps/SysAdmin — wherever the gaps are.
On the side I'm prototyping UMX Robotics — an affordable, 3D-printed robotic arm with ESP32 control and industrial PLC integration. Still early-stage, but improving fast.
Studying Mechatronics at the Technical University of Sofia – Plovdiv since 2022 (graduating 2026). Co-founded and co-lead the TU Robotics Club. Diploma project: a SCARA arm bridging ESP32 firmware and Mitsubishi PLC control over Modbus RTU.
LocationBulgaria LanguagesBG · EN · DE CertifiedLPIC-1 HobbiesHiking · CAD · Longboarding
08 — Contact
Email is the fastest way to reach me. I usually reply within a day.